Multifunctional Robotic Manipulation
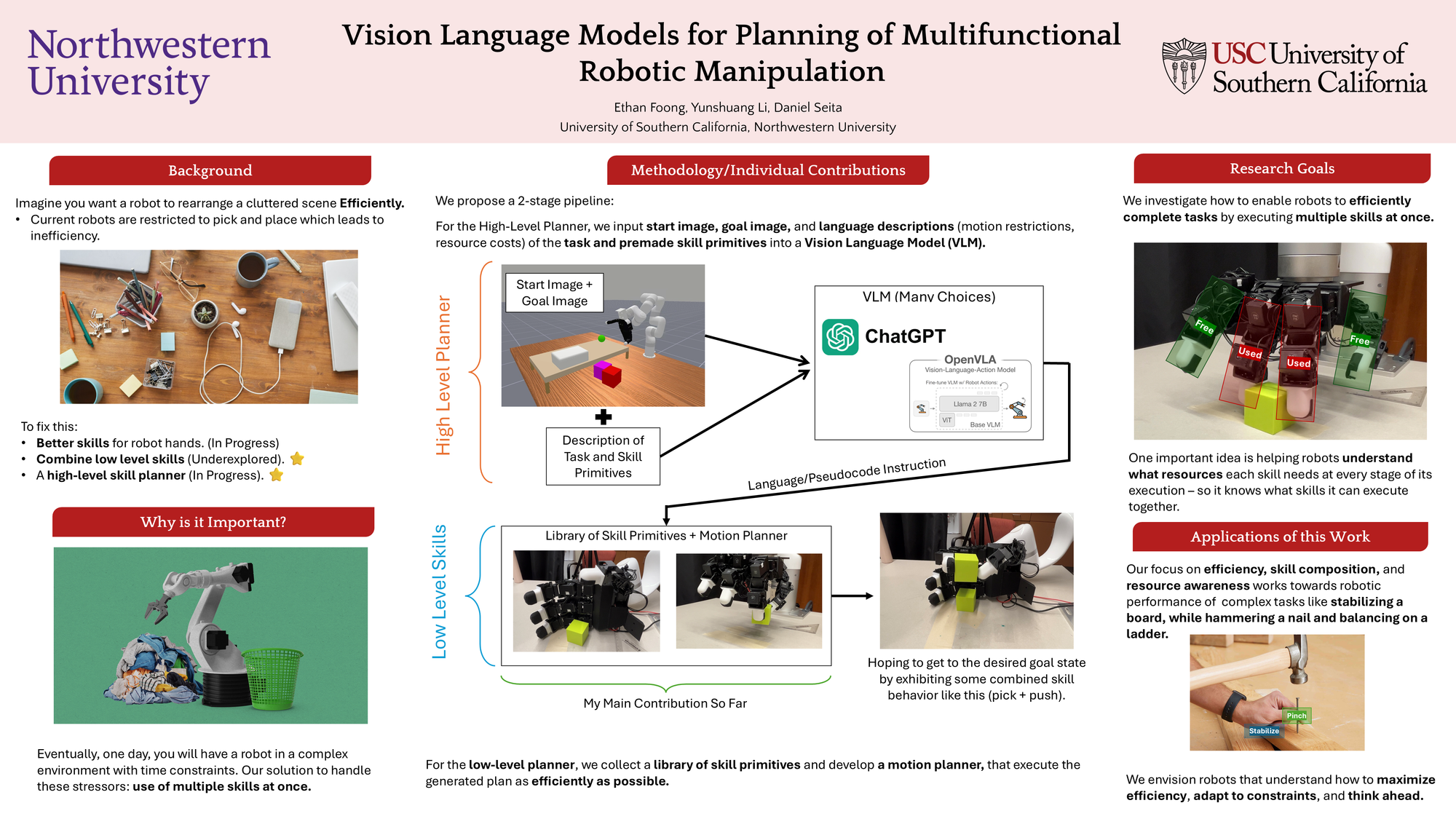
Over the summer of 2025, I worked with the SLURM Lab at USC on a project investigating multifunctional robot manipulation. This slide shows our motivation and some of the ways we've thought of solving the problem (although this method is not one we are pursuing anymore).
And here are some of the things I've developed in this project.
- A robot hand teleoperation system that can help test manipulation task feasability and allow collection of manipulation demonstrations for robot learning. Works with xArm7, Allegro and Leap hands, and the Rokoko motion capture Gloves.
0:00
/0:10
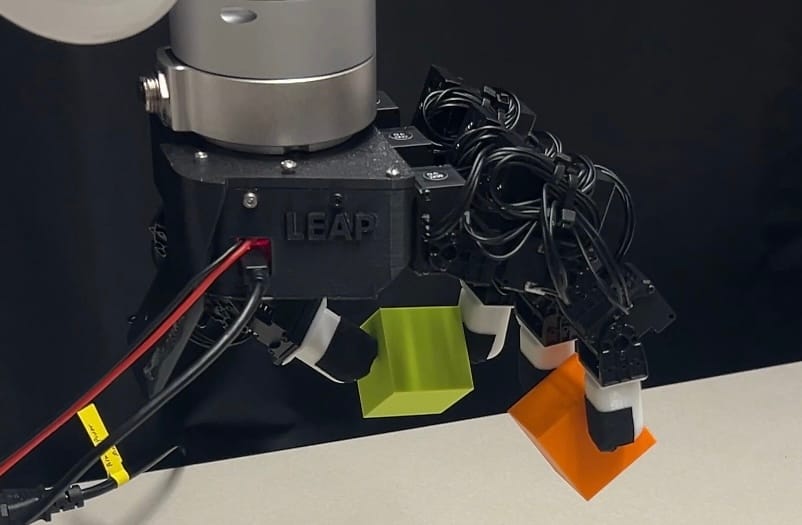
- A reinforcement learning pipeline that will allow dexterous robot hands to complete multi-functional tasks (like grabbing an object while pushing another, grasping an object and opening a drawer etc.) Simulations done in Maniskill and Isaac Gym. This is in progress.
0:00
/0:18
0:00
/0:02