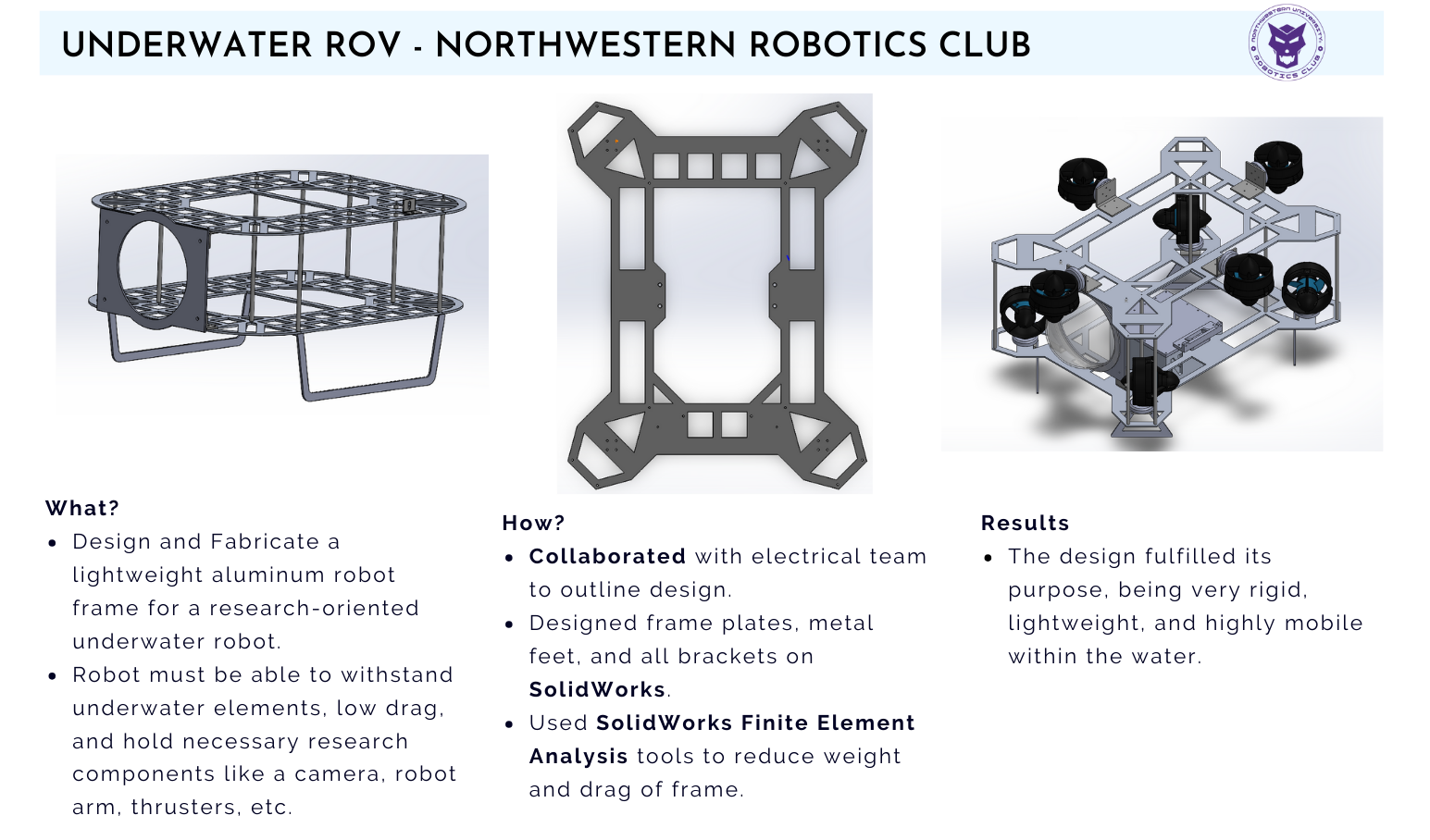
Underwater ROV Frame - Northwestern Robotics Club
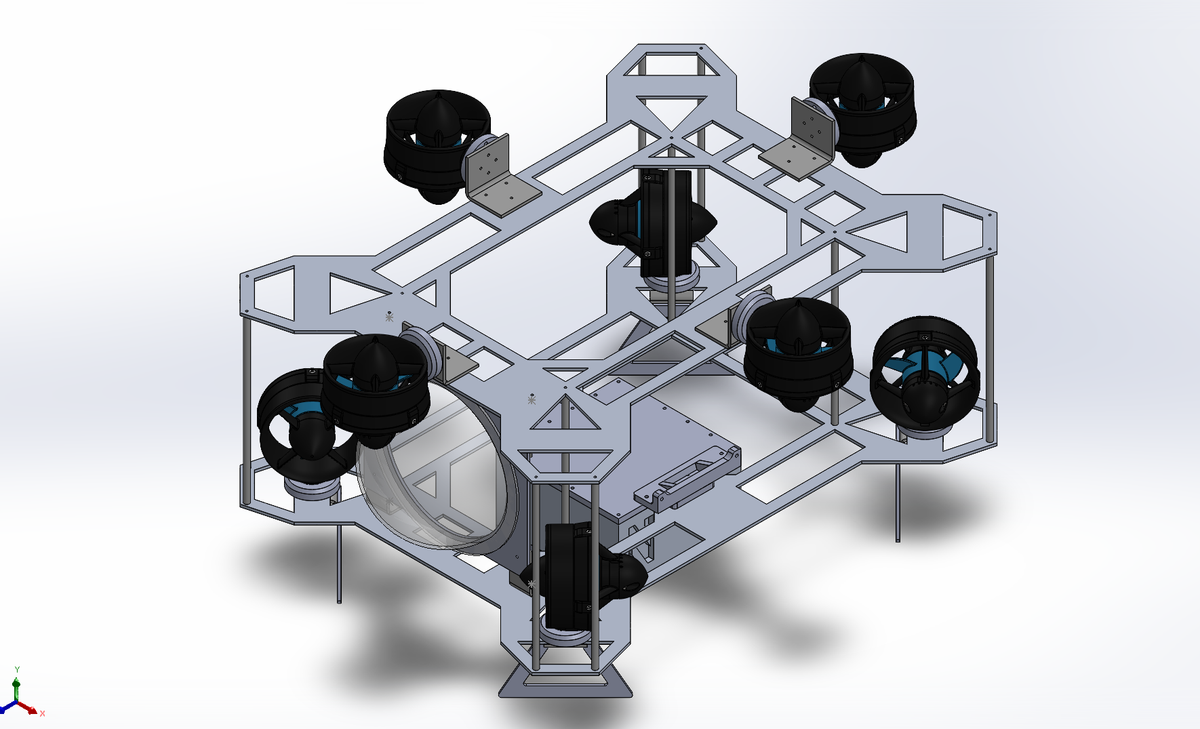
Since my freshman year at Northwestern, I've been a part of the underwater ROV division of our robotics club. During this time, one of my major projects has been designing a new robot frame in SolidWorks and performing FEA on the frame to optimize its drag and mass characteristics in the water.
Now, as a ROS 2 + SLAM software lead on the project, I've moved away from working on the mechanical aspects of the project, but I'm still excited to see how the design performs with the code my team and I are writing.
Here's a quick rundown of how the project has progressed: